Hei Blog
Hei BlogAn Autonomous Robot for Collision-Free Person Following through Model Predictive Control
Contents
论文名称:An Autonomous Robot for Collision-Free Person Following through Model Predictive Control
Introduction
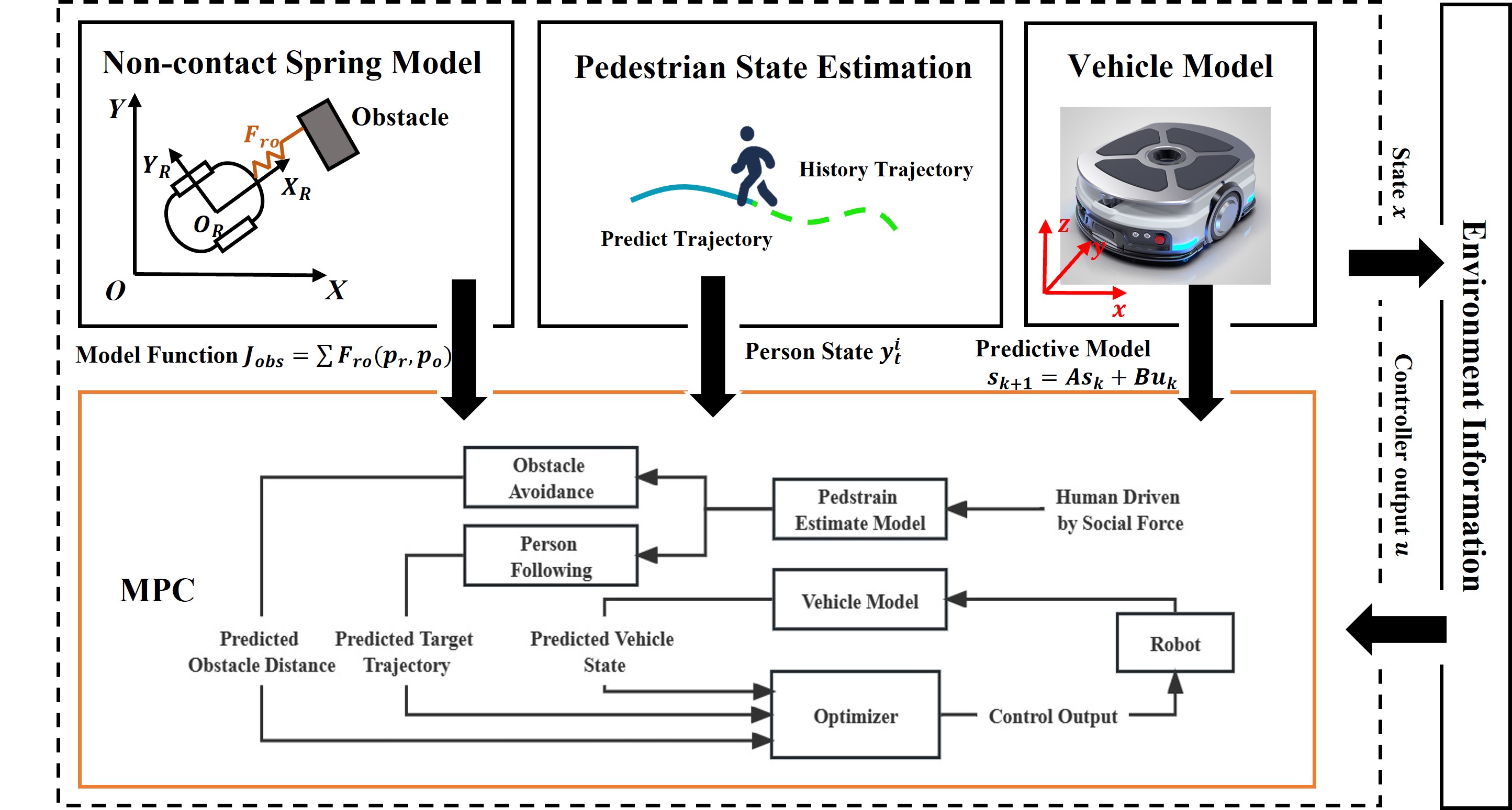
目前,在具有动态障碍物的复杂环境中对行人进行稳定跟随较为困难,主要是由于环境具有高度不确定性,同时跟随对象还具备较为灵活的行动。为了应对这些挑战,本文提出了移动机器人的运动规划框架。该方法将动态避障和目标跟随整合到一个基于模型预测控制(MPC)的优化问题中,并设置了终端约束。为了保证在动态环境中进行跟随任务的安全性,本文使用高频状态估计器来预测人类行为,并使用弹簧模型来模拟环境中的动态障碍物,使机器人远离障碍物。整体设计如下图所示:
Contribution
-
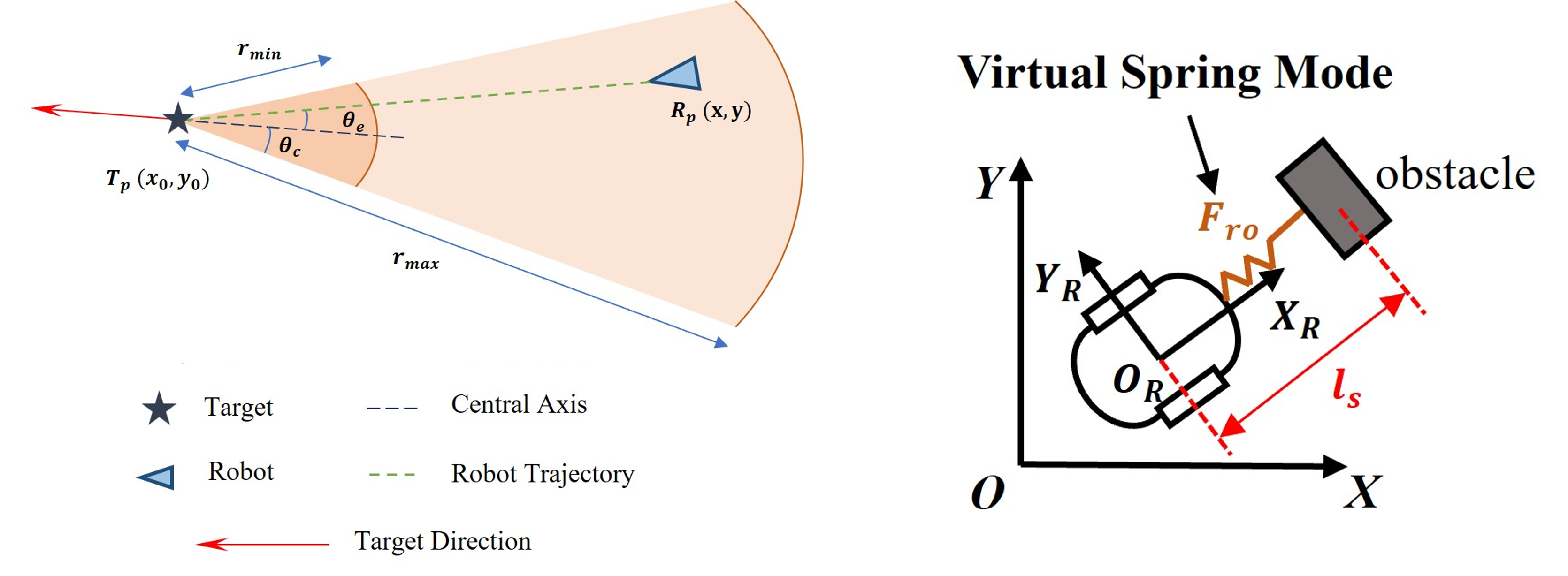
通过扇形终端约束将机器人终端位姿的求解空间调整到跟随对象附近合适的位置,从而实现跟随的效果;
-
通过虚拟弹簧模型,将机器人与动态障碍物之间的安全距离转化为软约束和硬约束加入到优化问题中,从而保证跟踪过程的安全。
Results
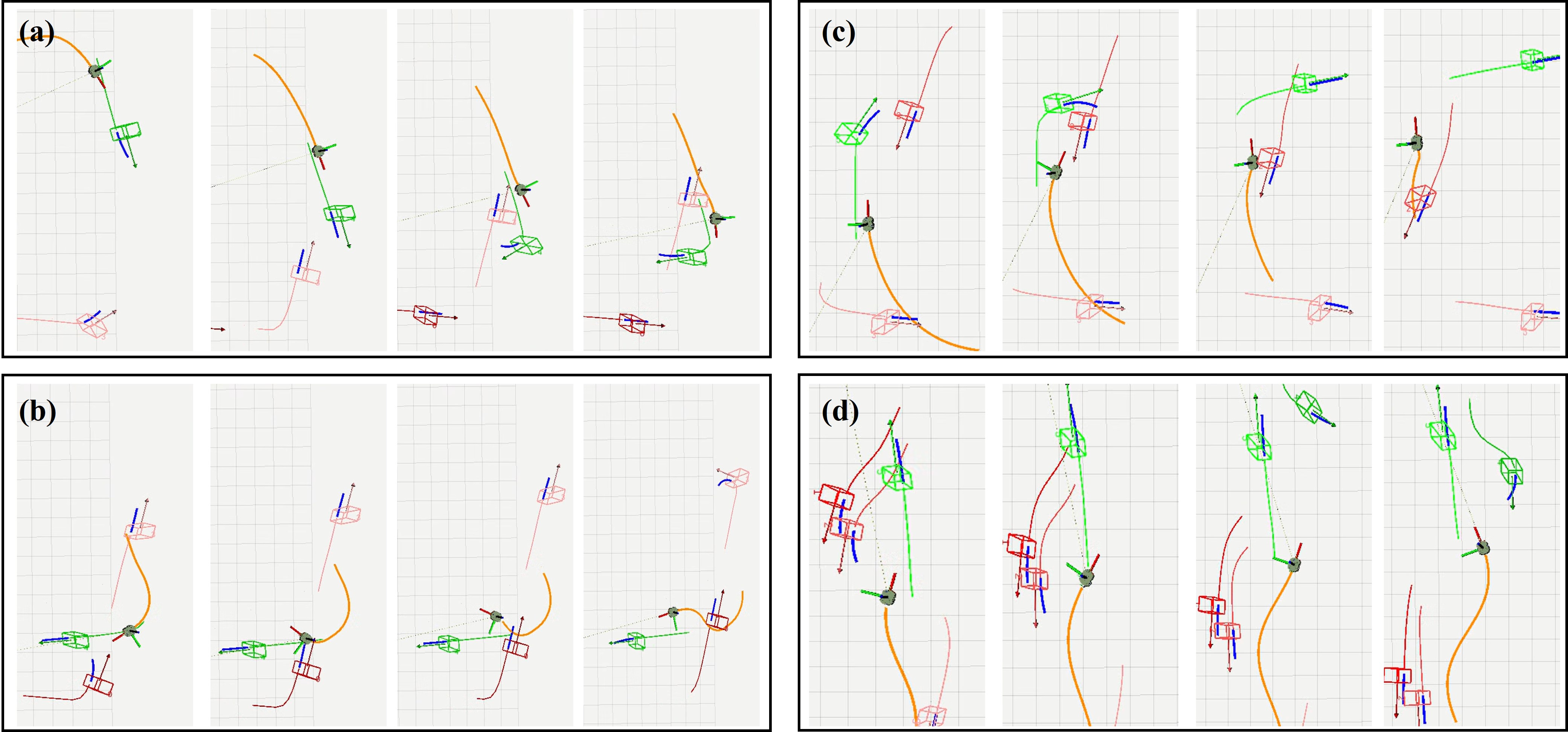
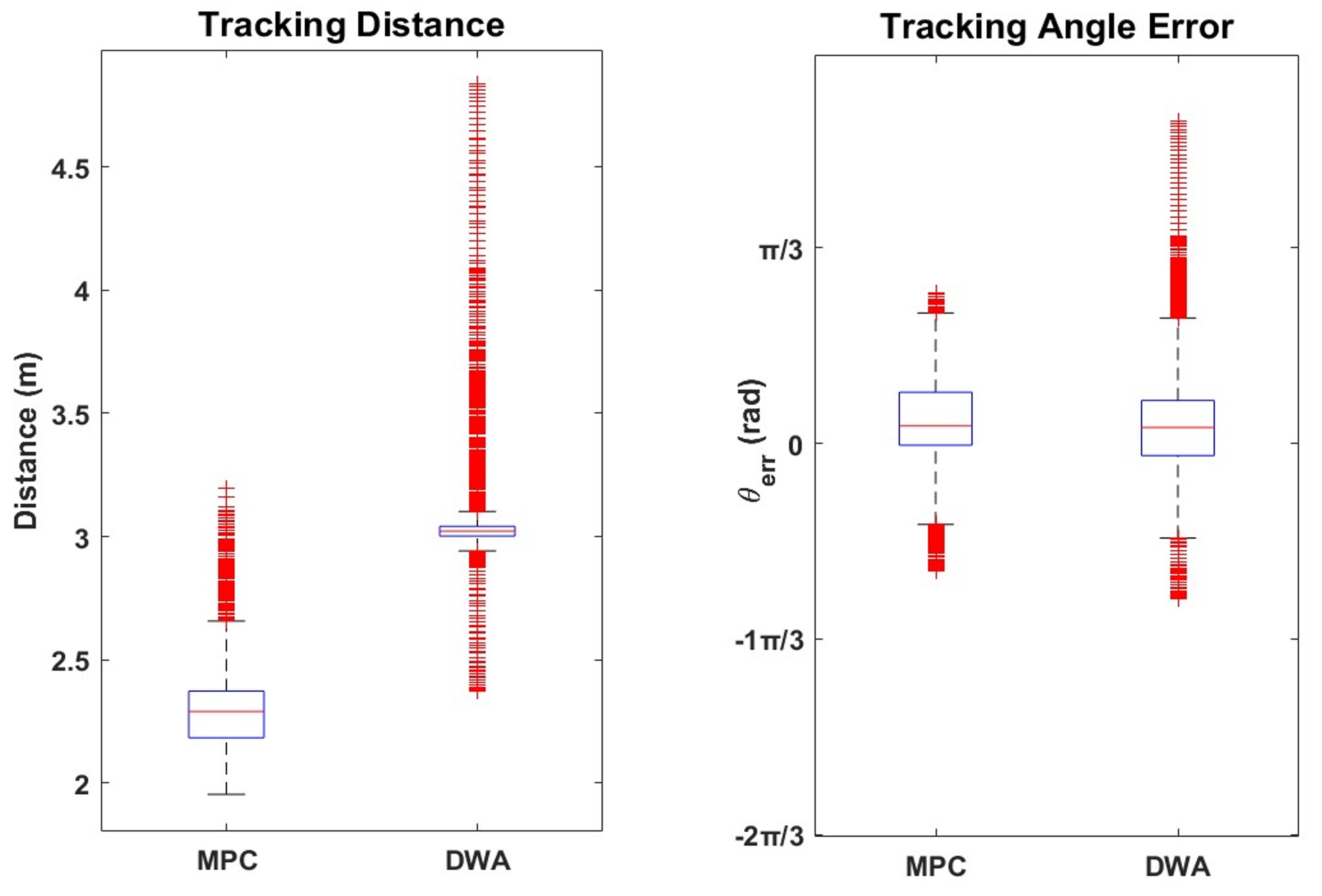
本文与基于DWA的方法进行了对比,发现在跟随过程中,DWA往往因为避障而导致跟随出现滞后性,这说明行人跟随任务需要一个具有预测功能的规划控制框架才能更好的完成;同时,基于MPC方法的行人跟随效果更好,不仅与行人的跟踪距离更短,同时角度误差也更小(这里角度误差指的是行人方向与机器人方向之间的误差)。