 Hei Blog
Hei Blogapollo决策规划--理论部分
规划
首先将车辆状态、环境信息转换到frenet坐标系下,进行规划,然后再把规划结果转换到笛卡尔坐标系下,进行控制
轨迹选取
成本函数包括:
- 偏离车道中心
- 与障碍物的距离(安全性)
- 速度和曲率的变化(平滑性)
- 对车辆的压力
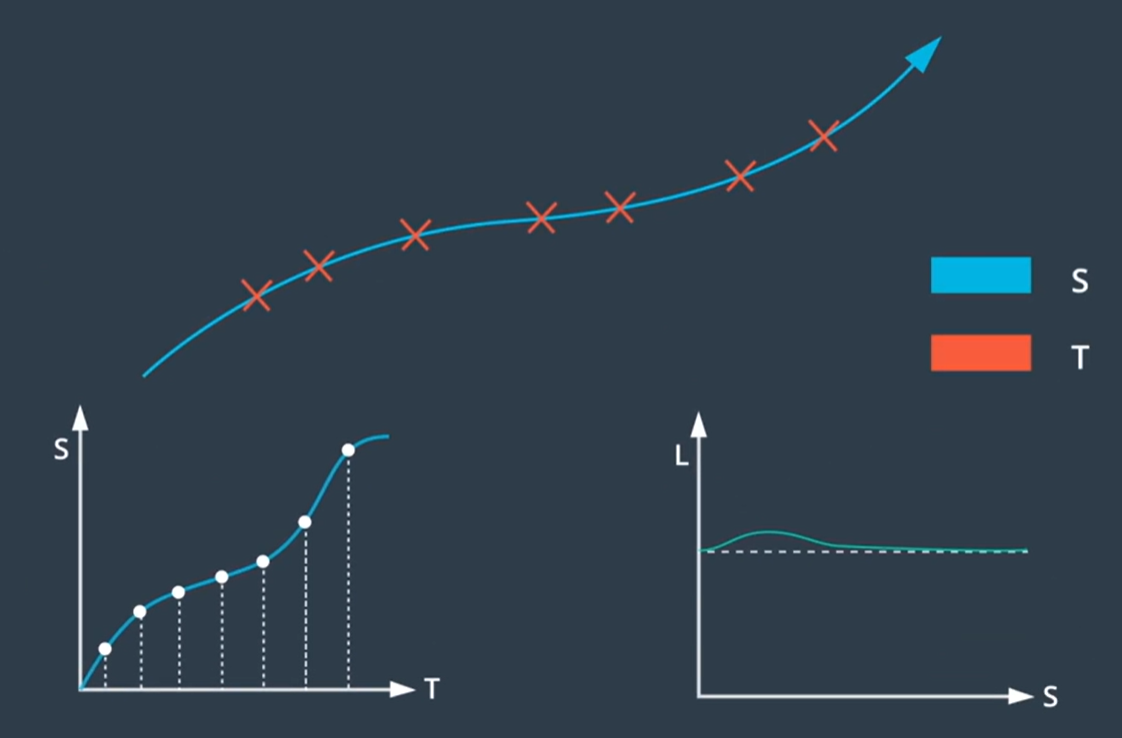
速度规划
ST图,纵坐标为汽车的纵向位移,横坐标为时间

在选择好路径之后,需要规划出在该路径上的速度,同样在ST图中进行规划:
首先把ST图分解为一个一个小格子(栅格地图),速度规划就是把格子的顶点进行连接(每条直线的速度不变)
然后把障碍物放到ST图中,表示为黄色矩形,该矩形表示在 时间区间内,会在
时间区间内,会在 路段出现障碍物(预测模块给出),那么在速度规划的时候就绝对不能碰到黄色矩形部分
路段出现障碍物(预测模块给出),那么在速度规划的时候就绝对不能碰到黄色矩形部分
把速度规划问题转换成了搜索问题

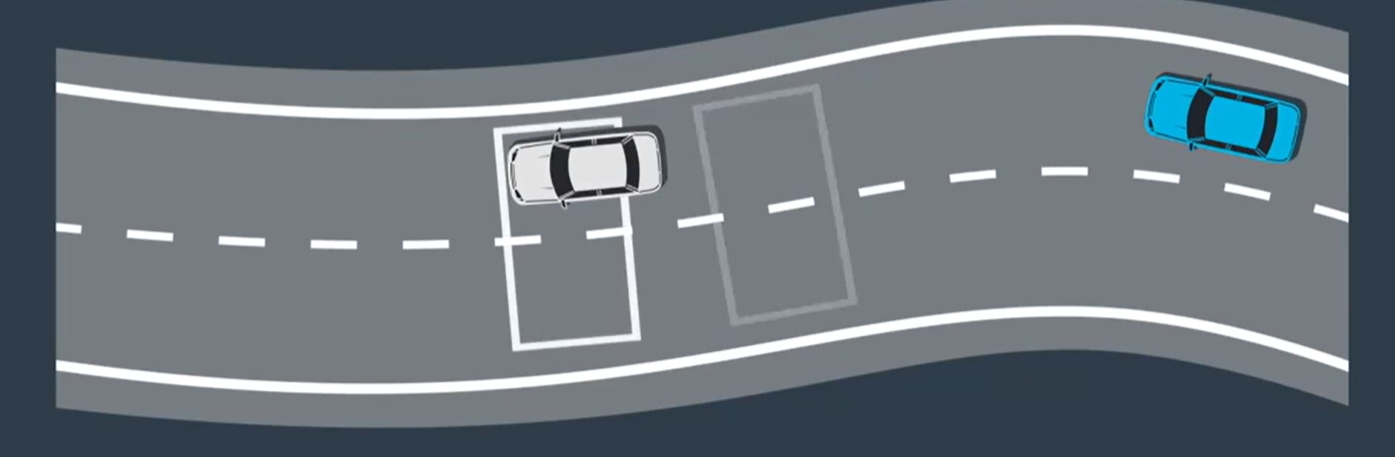
lattice规划
使用lattice方法进行轨迹规划:
首先把三维的路径(纵向、横向、时间)解耦成 纵向规划 和 横向规划,纵向规划使用ST图,横向规划使用SL图
然后再将ST和SL结合起来
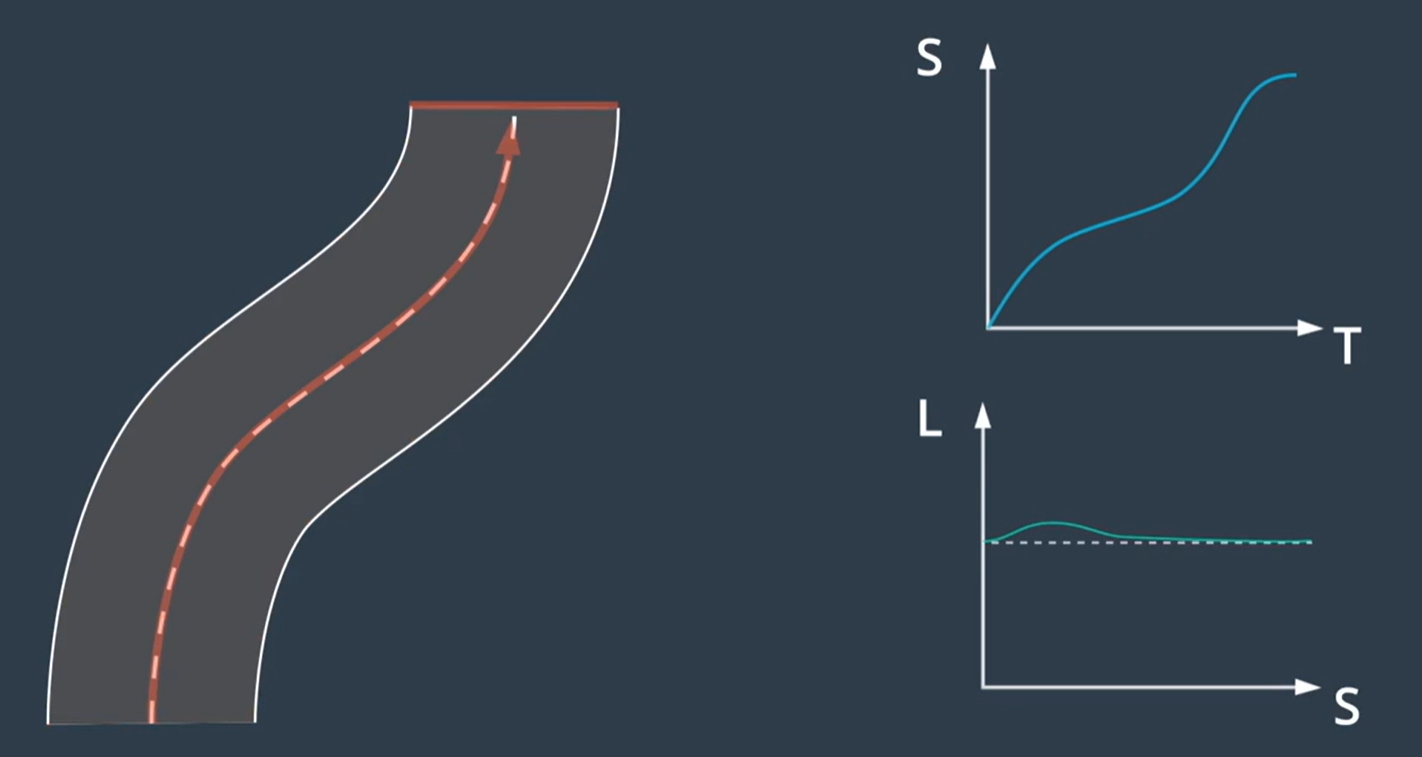
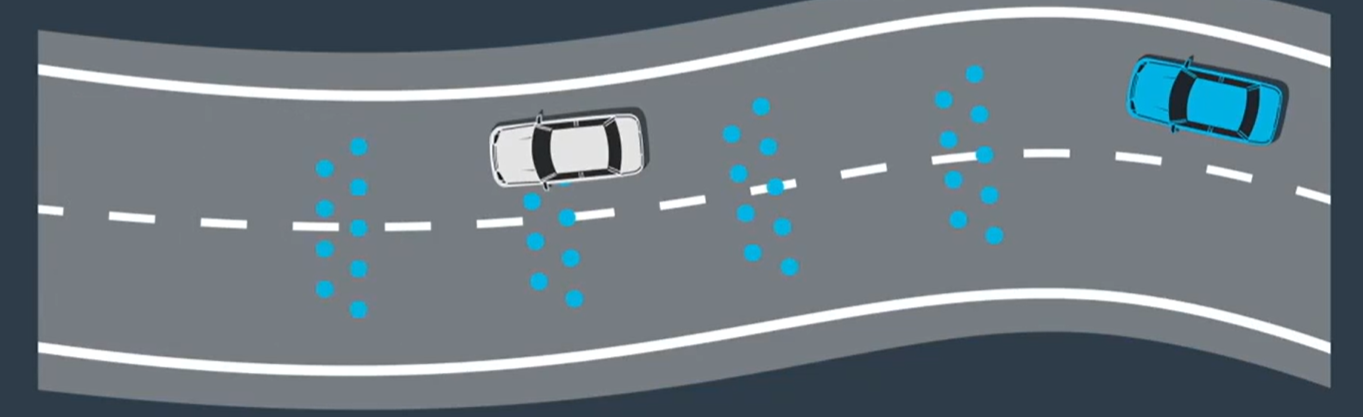
lattice规划是根据起始状态和终止状态进行规划的方法,所以首先我们应该明确终止状态是什么:
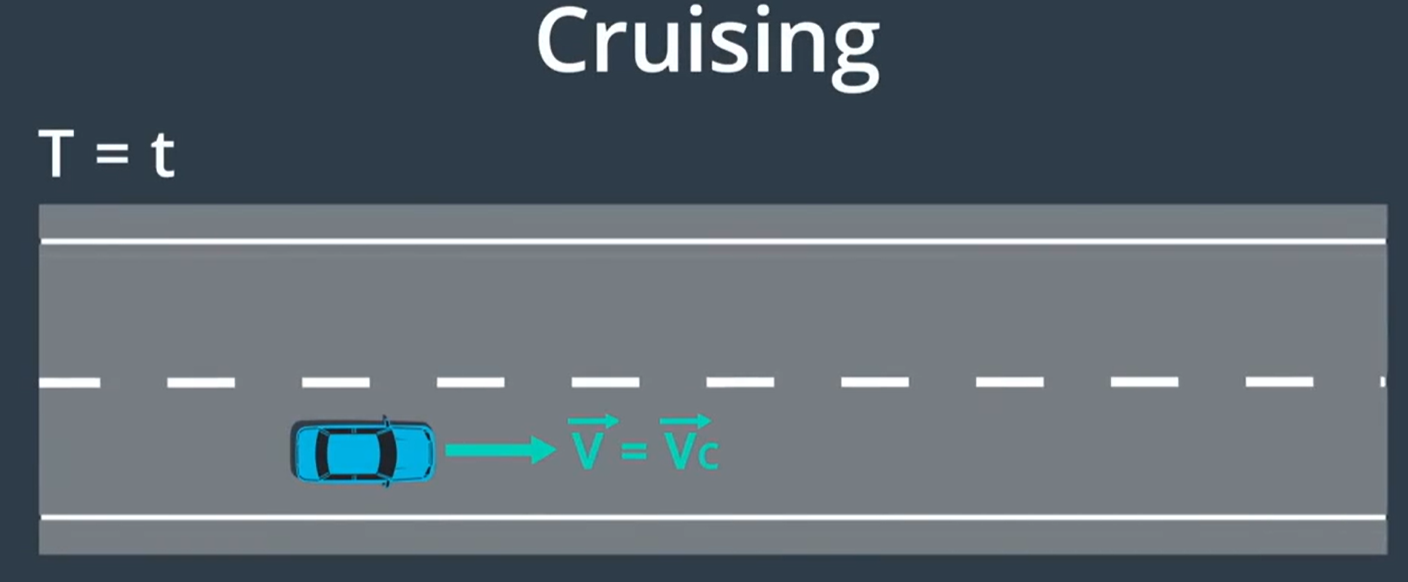
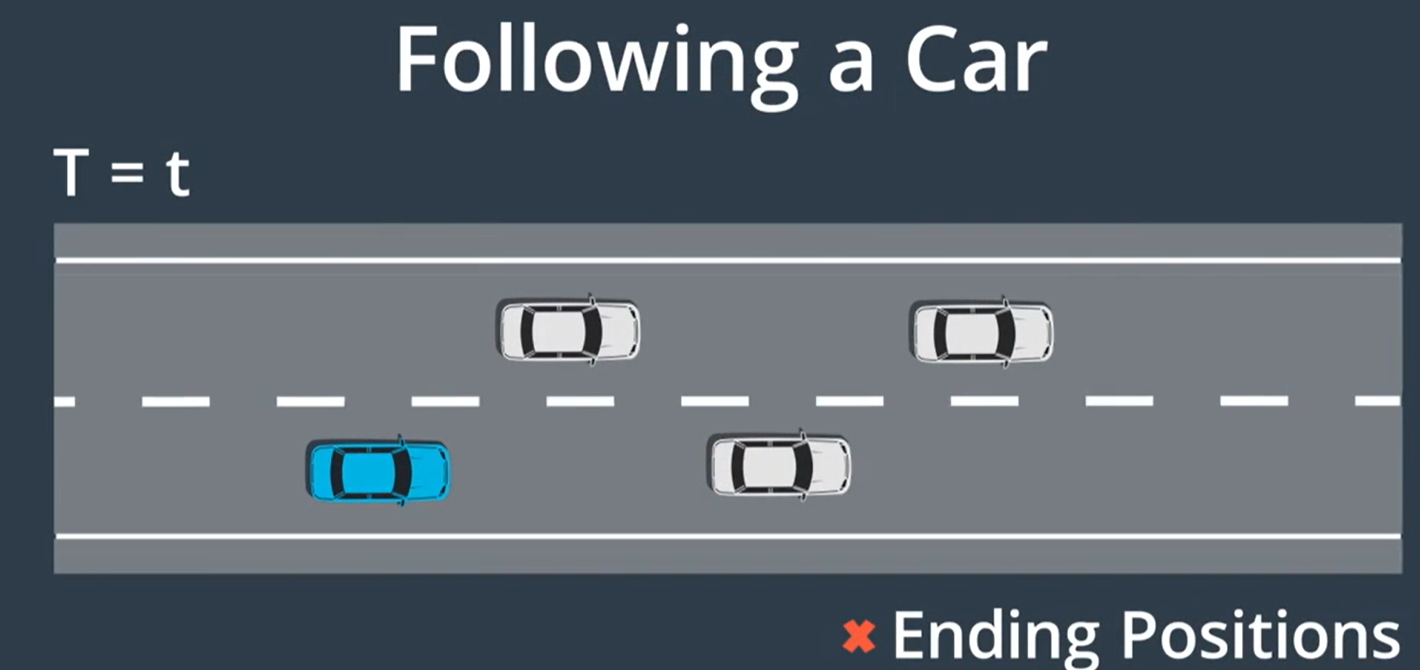
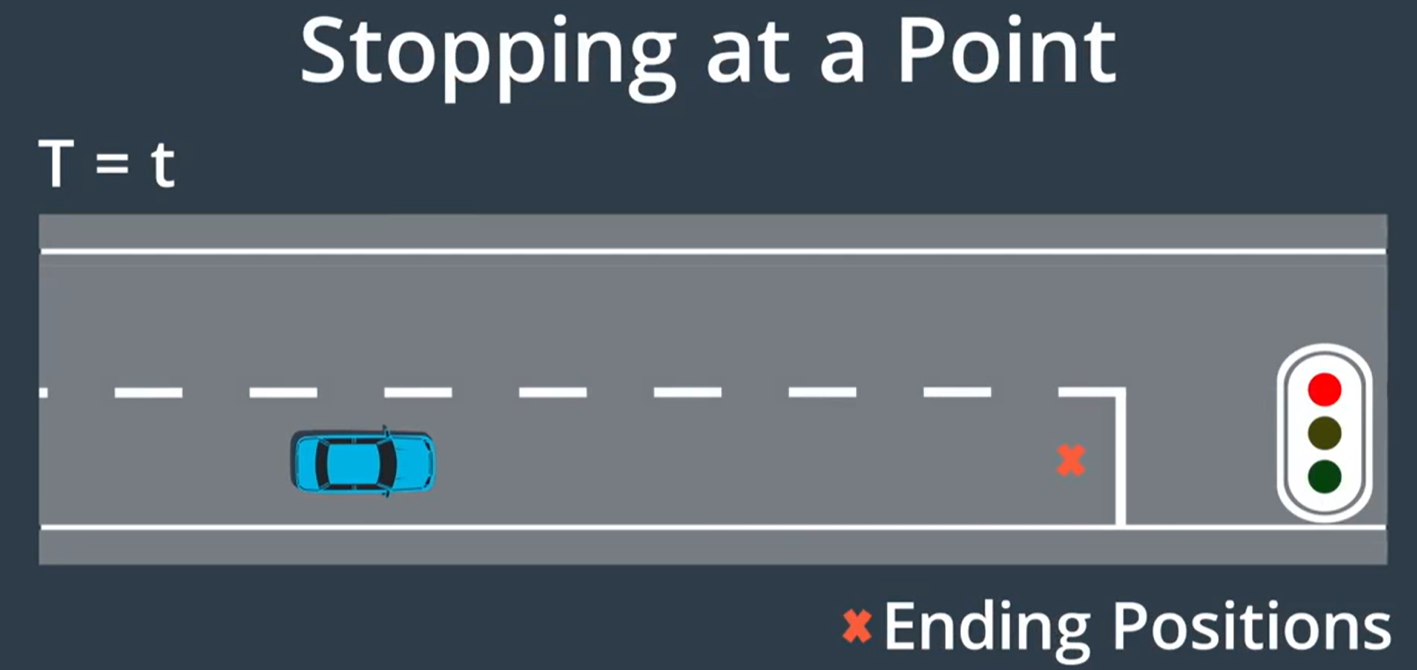
ST图终止状态
巡航
跟随
停止
SL图的终止状态
保持车在车道线中心,终止状态的朝向和位置的一阶和二阶导数都为0(即纵向和横向的a、v都为0)

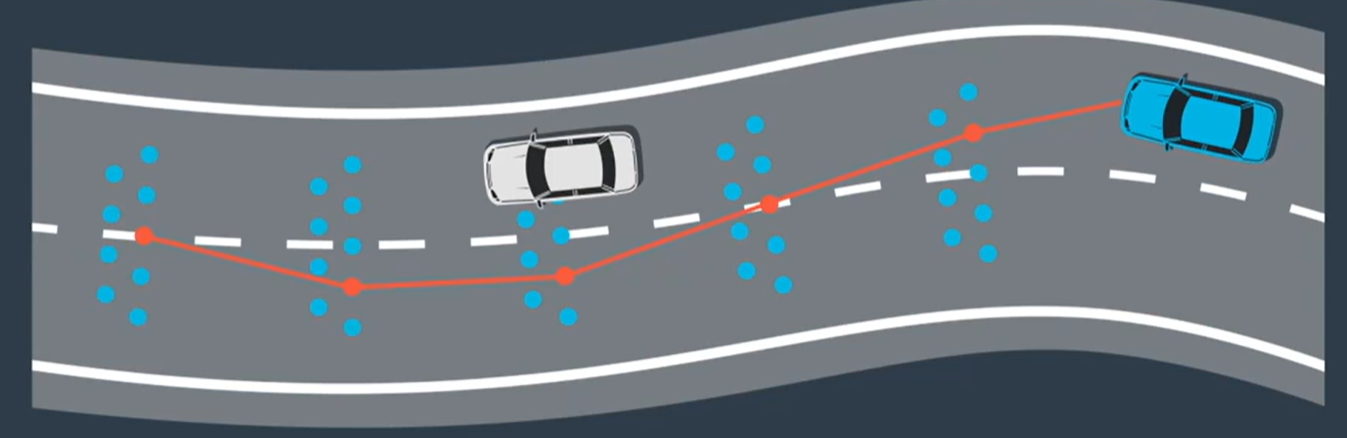
然后使用二次规划方法得到ST和SL图,再将二者结合成三维轨迹
二次规划
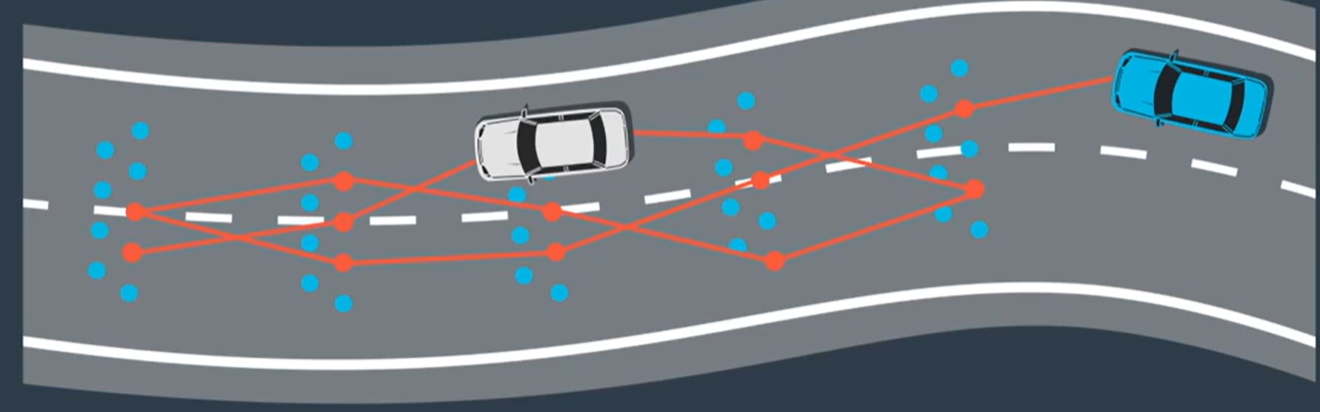
第一步和第二步的路径和速度都是不平滑的,所以要用二次规划对其进行优化
最后将路径和速度进行结合,得到规划结果
